自動(dòng)駕駛的未來之眼 超越ADAS,下一代無人駕駛的傳感器技術(shù)演進(jìn)
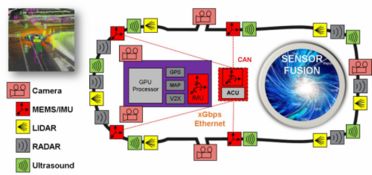
隨著高級(jí)駕駛輔助系統(tǒng)(ADAS)技術(shù)逐漸成熟并邁向全無人駕駛的終極目標(biāo),汽車的感知系統(tǒng)正經(jīng)歷一場深刻的革命。未來的無人駕駛汽車將不再依賴單一或少數(shù)幾種傳感器,而是走向一個(gè)多模態(tài)、高冗余、深度融合的感知新時(shí)代。除了當(dāng)前主流的攝像頭、毫米波雷達(dá)和激光雷達(dá)(LiDAR)外,以下幾類傳感器技術(shù)將在未來發(fā)展中扮演關(guān)鍵角色,共同構(gòu)筑起無人駕駛的安全與智能基石。
1. 高分辨率、高性能固態(tài)激光雷達(dá)
當(dāng)前的機(jī)械旋轉(zhuǎn)式激光雷達(dá)在成本、可靠性和車規(guī)級(jí)應(yīng)用上存在挑戰(zhàn)。固態(tài)激光雷達(dá)(包括Flash、OPA、MEMS等方案)將成為主流。它們沒有運(yùn)動(dòng)部件,更緊湊、更耐用、成本更低,并能實(shí)現(xiàn)更高的點(diǎn)云密度和更遠(yuǎn)的探測距離。其核心價(jià)值在于提供車輛周圍環(huán)境的精確三維幾何信息,尤其在惡劣天氣或低光照條件下,是對視覺系統(tǒng)的重要補(bǔ)充。
2. 4D成像毫米波雷達(dá)
傳統(tǒng)毫米波雷達(dá)能探測距離和速度,但分辨率低,難以識(shí)別物體輪廓。4D成像雷達(dá)通過在傳統(tǒng)三維(距離、方位、速度)基礎(chǔ)上增加“高度”維度,并能形成高分辨率的點(diǎn)云圖像。它具備卓越的穿透能力(如雨、霧、塵),能有效彌補(bǔ)激光雷達(dá)在極端天氣下的性能衰減和視覺系統(tǒng)在能見度低時(shí)的局限,是實(shí)現(xiàn)全天候、全時(shí)域感知的關(guān)鍵。
- 高動(dòng)態(tài)范圍與事件相機(jī)
- 高動(dòng)態(tài)范圍(HDR)攝像頭:未來的攝像頭需要應(yīng)對瞬息萬變的光照條件(如隧道出入口、夜間對向車燈眩光)。HDR技術(shù)能在一幀圖像中捕捉更寬的亮度范圍,確保在強(qiáng)光或暗光下都能清晰成像,為視覺算法提供更可靠的輸入。
- 事件相機(jī):這是一種革命性的生物啟發(fā)式視覺傳感器。它不像傳統(tǒng)攝像頭以固定幀率捕捉整個(gè)場景,而是異步檢測每個(gè)像素的亮度變化(“事件”)。其優(yōu)勢在于微秒級(jí)的延遲、極高的動(dòng)態(tài)范圍(不受強(qiáng)光影響)以及極低的功耗。它特別擅長捕捉高速運(yùn)動(dòng)物體,能解決傳統(tǒng)攝像頭在高速場景下的運(yùn)動(dòng)模糊問題。
4. 熱成像(紅外)傳感器
熱成像相機(jī)通過探測物體發(fā)出的紅外輻射來生成圖像,完全不依賴環(huán)境光。這使得它在完全黑暗、濃霧或煙霧中具有不可替代的優(yōu)勢。未來的自動(dòng)駕駛系統(tǒng),特別是面向Robotaxi和貨運(yùn)等復(fù)雜場景,可能會(huì)集成熱成像傳感器,用于檢測夜間行人、動(dòng)物等生命體,極大提升夜間和惡劣天氣下的安全性。
5. 高精度定位與慣性導(dǎo)航單元
絕對精準(zhǔn)的定位是無人駕駛的基石。未來的系統(tǒng)將深度融合:
- 高精度GNSS(如RTK):提供厘米級(jí)絕對位置。
- 高精度慣性測量單元:在隧道、城市峽谷等GNSS信號(hào)丟失時(shí),提供短期、高精度的航位推算。
- 高精度地圖與傳感器匹配:利用激光雷達(dá)或攝像頭掃描周圍環(huán)境,與預(yù)存的高精地圖進(jìn)行實(shí)時(shí)匹配,實(shí)現(xiàn)無縫定位。
6. V2X車路協(xié)同通信模塊
雖然并非傳統(tǒng)意義上的“傳感器”,但V2X(Vehicle-to-Everything)技術(shù)讓車輛能“感知”視線范圍之外和數(shù)秒之后的交通狀況。通過與其他車輛、基礎(chǔ)設(shè)施、行人設(shè)備通信,它可以獲取交叉路口盲區(qū)信息、前方緊急剎車預(yù)警、紅綠燈信號(hào)相位等,實(shí)現(xiàn)了超視距和非視距的感知,是單車智能的重要補(bǔ)充和冗余。
7. 超聲波傳感器的升級(jí)與拓展
超聲波傳感器在近距離泊車、低速障礙物檢測中成本效益極高。其探測精度、范圍和抗干擾能力將持續(xù)提升,并可能在車輛周身形成更密集的近距離感知網(wǎng)絡(luò),專精于0-5米范圍內(nèi)的精細(xì)環(huán)境建模。
發(fā)展趨勢:深度融合與智能前移
未來無人駕駛的感知系統(tǒng),核心不在于堆砌傳感器數(shù)量,而在于 “融合”與“智能”:
- 前融合與特征級(jí)融合:從當(dāng)前主流的后融合(各傳感器獨(dú)立處理后再合并結(jié)果)向前融合(原始數(shù)據(jù)層進(jìn)行融合)演進(jìn),能更早、更充分地利用不同傳感器的互補(bǔ)信息,提升感知的準(zhǔn)確性和魯棒性。
- 傳感器硬件與AI算法的協(xié)同設(shè)計(jì):如事件相機(jī)與脈沖神經(jīng)網(wǎng)絡(luò)(SNN)的適配,專用AI芯片與傳感器數(shù)據(jù)的直接處理,將計(jì)算“前置”到傳感器端,降低延遲與帶寬壓力。
- 軟件定義傳感器與冗余設(shè)計(jì):通過軟件配置,同一傳感器硬件可能在不同場景下執(zhí)行不同任務(wù)。系統(tǒng)將構(gòu)建多層次、跨模態(tài)的冗余,確保任一傳感器失效時(shí),關(guān)鍵感知功能依然可用。
從ADAS到無人駕駛,傳感器技術(shù)正朝著 “全域覆蓋、全時(shí)可用、高度冗余、深度智能” 的方向演進(jìn)。多種傳感器的優(yōu)勢互補(bǔ)與深度協(xié)同,將成為解鎖L4/L5級(jí)完全自動(dòng)駕駛安全性與可靠性的最終鑰匙。
如若轉(zhuǎn)載,請注明出處:http://www.zuqiou.com/product/42.html
更新時(shí)間:2026-05-18 07:07:05